
KNOWLEDGE BASE CONTENTS
Knowledge Base / Successfully Collect High Quality Radar Data / Collection Planning
5.1 Collection Planning
Collection planning for any remote sensing mission is a crucial step in collecting relevant and timely data. To develop a successful radar data collection plan, mission specialists need to perform a terrain and mission analysis, understand radar geometry, and know the capabilities of their radar system and the platform they will use for collection.

IMSAR NSP-7 Radar System on a Cessna
Pre-Mission Analysis
To optimize their results, radar operators need to perform a pre-mission analysis before they begin directing an aircraft and sensor to collect data. An analysis should consider the following factors:
Mission Requirements
- What intelligence or information requirements are we expecting to answer with the sensor(s)?
- What type of imagery derived products will be required to satisfy the intelligence/information requirements?
- Time and resources available for the data collection
- Latest-Time Intelligence/Information-Of-Value (LTIOV), or when is the cutoff time for useful intelligence gathering?
Capabilities
- What are the capabilities of my radar sensor?
- Radar modes (SAR, CCD, GMTI, MMTI)
- Minimum/maximum detection ranges
- Flight-plan and/or auto-collect tasking options
- Which radar frequencies are optimal for the type of collection I need?
- X or Ku band for fine-resolution SAR/CCD imaging and MTI
- Ultra Wideband (VHF to L band) for FOPEN/GPEN and other special collection missions
- What aircraft is being used?
- Manned or unmanned
- Command and control interface between the aircraft, radar, and other sensors
- What is the mission endurance (on-station time) available for the data collection?
- Will it require revisit, and at what revisit rate?
Operational Environment
- What dynamics are expected in the target area?
- Moving or stationary targets
- Permissive or hostile environment
- Amount of activity or pattern of life expected at the target location
- What is the climate or expected weather conditions?
- Will the climate or weather conditions affect primary/secondary sensors? How?
- What is the terrain type or topography within the collection area?
- Land, sea, and/or littoral zone
- Desert, vegetation, mountains, maritime, urban
- Which grazing and look angles are needed to achieve the best possible images/MTI of the target location in this terrain?
Terrain Masking: In a pre-mission analysis, the possibility of terrain masking is an important consideration. The terrain of an area can hide, or mask, objects of interest, depending on the angle at which the data is collected. If radar energy does not reach a particular area due to terrain masking, no CCD products will be collected because the area neither receives nor returns any radar energy. Operators should look at the collection area first before making a flight plan, so terrain masking is minimized or mitigated completely by collecting at the right geometry.

Terrain Masking: Radar Energy does not Reach the Areas Shadowed by the Terrain
Radar Geometry
When planning for a data collection, operators need to consider the angle at which the radar is transmitting to the surface being scanned. The optimal angle depends on the desired radar mode. For example, for high-detailed SAR collection, a steeper grazing angle might be optimal, but for MTI and broad coverage SAR, a shallower grazing angle is typically desired.


Example Grazing Angles for Data Collection: Fine-resolution SAR imaging collected at a 45-degree grazing angle, and GMTI data collected at a 20-degree grazing angle
For more information on the relevant angles involved in airborne SAR collection, see Interpreting Radar Imagery.
Capabilities of Radar at Different Frequencies
Aligning the goals of the ISR mission with the capabilities of the radar is essential. Different radar modes allow for different types of data intelligence. Also, different frequency bands are capable of gathering different types of information.
Radar is most sensitive to objects that are larger than the wavelength of the transmitted signal and is mostly unaffected by relatively smaller particles. Radars operating at lower frequency bands have longer wavelengths and may achieve some degree of ground penetration (GPEN) or foliage penetration (FOPEN). For example, an Ultra Wide Band (UWB) radar system, which spans between the UHF and L bands (with wavelengths between 15 cm to 1 m), will provide better GPEN and FOPEN properties than radars with shorter wavelengths at higher frequency bands, such as Ku-band with a wavelength of about 1.6-2.0 cm. However, the shorter wavelength and higher frequency bands are generally better for making clearer images of smaller objects and features, which can lead to better target classification, tracking, and change detection.

Examples of the Capabilities of Radar at Different Frequencies. Radar frequency bands with shorter wavelengths, such as Ku, bounce off leaves, while frequency bands with longer wavelengths such as UWB penetrate leaves.
| Radar Modes at Different Frequencies | ||
| Radar Mode/Capability | Use | Ideal Frequency Bands |
| Fine-resolution SAR imagery | Detection/classification/identification of stationary objects and general operational environment | X, Ku, Ka |
| MTI | Detection and tracking of moving targets | X, Ku, Ka |
| CCD | Monitoring of change in an area | X, Ku, Ka |
| FOPEN | Detection of stationary targets beneath foliage | VHF, UHF, UWB |
| GPEN | Detection of stationary targets below the ground’s surface | VHF, UHF, UWB |
For more information on radar frequencies, see Radar Characteristics in Interpreting Radar Imagery.
For more information on IMSAR radar capabilities, see Multimode Capability.
Flight Plans
The angle, direction, and location of the radar relative to the surfaces being imaged matter for different types of data collection products, so pilots will need flight plans as well as skills to fly the aircraft to collect the best data.
For some SAR data products these plans are a necessity. For example, for a SAR sensor to collect CCD data, the sensor must image the same area at least twice from the same geometry using the same collection parameters. When mission specialists follow this procedure, the system can use data “pairs” to identify what has changed. Since change detection imagery requires precise positioning of the sensor while it is imaging the area, creating predetermined flight plans to match the parameters of each mission is essential.
The flight plan consists of predetermined flight “tracks” that the aircraft must follow. For best results, the platform should minimize deviations from the flight track for each collection pass.

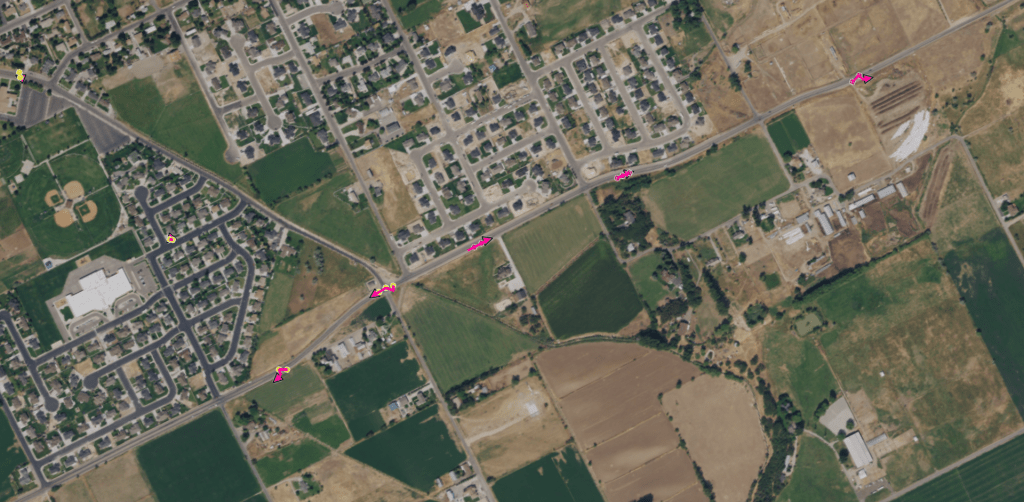
Example Predetermined Flight Tracks Shown in IMSAR’s Mission Management Software, Lisa 3D
Mission Management Software Capabilities
Operators need to be familiar with the capabilities of their mission management software before they begin a data collection. Some data collection tasks can be automatically performed by the software, but a radar operator will need to perform other tasks. Practicing tasks through simulations will help prepare operators for future collections.
Mission management software can have Command and Control (C2) functionality, Processing, Exploitation, and Dissemination (PED) functionality, or both. IMSAR’s mission management software, Lisa 3D, performs both C2 and PED functions:
| Lisa 3D Software Functions | |
| C2 Features | PED Features |
| Radar state control | 3D interactive viewing environment |
| Radar, datalink, and server health status | Multisensor data management |
| Radar mode selection | Timeline-based data display |
| Flight plan creation | Forensic database/historical imagery search tools |
| Scan patterns selection | Imagery analysis tools |
| Radar orientation/collection geometry | Built-in imagery product templates |
| Command and control of other sensors | Data storage, sharing & export |
Lisa 3D Auto-Collect
In addition to using predetermined flight plans, radar operators also have the option to use auto-collect modes in Lisa 3D, which enables the radar to collect data over a designated area without a predetermined flight plan as long as the path is within the radar’s field of regard. Operators can choose the following collection modes within Auto-Collect:
- SAR Imaging: Spotlight, Path (Stripmap)
- MTI: Spotlight, Broadside, Sector Scan
Lisa 3D Visual Guidance
The Visual Guidance feature of Lisa 3D assists in flight accuracy during data collection by providing the pilot or unmanned platform operator with a real-time display of the radar’s relative position to the overall flight plan and the currently-selected flight leg. When collecting data according to a predetermined flight track, the goal is to fly as close as possible to the desired flight path with minimum roll, pitch, and crab. The Visual Guidance Plugin also features “vectoring”, which assists pilots in keeping a target in the radar’s field of regard during auto-collect missions. The purpose of vectoring in Visual Guidance is to provide the operator or pilot a real-time display of where the radar is supposed to be flown.
Plan Completion
Mission specialists armed with a thorough pre-mission analysis, a flight plan, and a basic understanding of radar geometry and their equipment’s capabilities are set up for success to collect valuable and timely intelligence with radar.
For more information on the general capabilities of Lisa 3D and IMSAR’s radar control API, see Taking Advantage of Mission Management Software.
The training sessions included with every radar purchase provide customers with more details on collection planning. For more information about IMSAR radars, contact us at sales@imsar.com.
Related Content
Updated March 17th, 2022

















")


")























")
")


